PID控製原理
來源:rootadmin | 2023-08-19
pid控製在工藝中根據不同的情況選用不同的參數進行控製,pid也是在工業中常用的調節工業的使用手法;
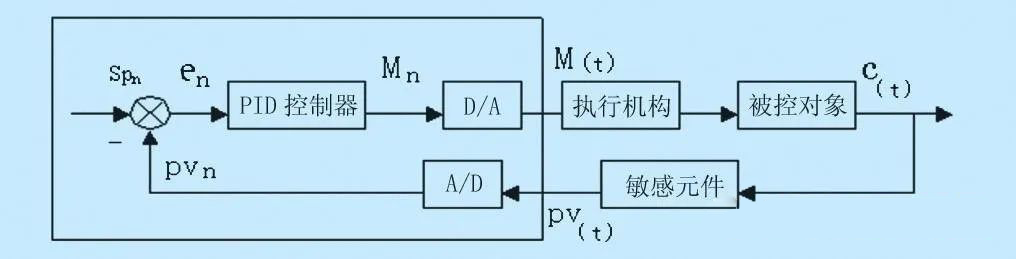
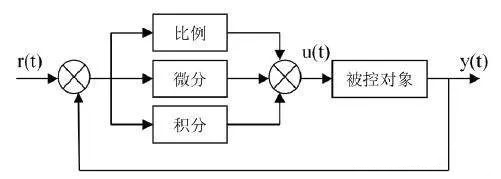
(1)輸入元件:給出與期望輸出對應的輸入量。
(2)比較元件:求輸入量與反饋量的偏差,常采用集成運算放大器A/D來實現。
(3)放大元件:由於偏差信號一般較小,不足以驅動負載,故需要放大元件,包括電壓放大及功率放大。
(4)執行機構:直接驅動被控對象,使輸出量發生變化。常用的有電動機、調節閥、液壓馬達等。
(5)測量元件:檢測被控量並轉換為所需要的電信號。在控製係統中常用的有用於速度檢測的測速發電機、光電編碼盤等;用於位置與角度檢測的旋轉變壓器、自整機等;用於電流檢測的互感器及用於溫度檢測的熱電偶等。這些檢測裝置一般都將被檢測的物理量轉換為相應的連續或離散的電壓或電流信號。
(6)校正元件:也叫補償元件,是結構與參數便於調整的元件,以串聯或反饋的方式連接在係統中,完成所需的運算功能,以改善係統的性能。根據在係統中所處的位置不同,可分別稱為串聯校正原件和反饋校正元件。
聲明:本文僅供學習交流分享,版權歸原作者所有
感恩原作者辛勤付出,若涉及版權問題請聯係刪除










